1. NVIDIA Container Toolkit, ROS2 Humble Docker 설치
NVIDIA Container Toolkit 설치
관련 포스팅Docker 설치Docker 명령어 모음 NVIDIA Container ToolkitDocker 컨테이너 내에서도 NVIDIA GPU를 사용할 수 있도록 지원하는 도구 Installationcurl -fsSL https://nvidia.github.io/libnvidia-container/gpgk
soheelog.com
Docker를 통한 ROS2 Humble 재설치: with CUDA & GUI 환경
관련 포스팅Docker 설치Docker 명령어 모음NVIDIA Container Toolkit 설치Docker를 통한 ROS2 Humble 설치 지난 포스팅 Docker를 통한 ROS2 Humble 설치를 진행하고 나서 재부팅 이후에 `qt.qpa.xcb: could not connect t
soheelog.com
GitHub - sohee-zoe/ros2-humble-Dockerfile: Ubuntu 22.04 ROS 2 Humble
Ubuntu 22.04 ROS 2 Humble. Contribute to sohee-zoe/ros2-humble-Dockerfile development by creating an account on GitHub.
github.com
2. CARLA, CARLA-Autoware-Bridge, Autoware
GitHub - TUMFTM/Carla-Autoware-Bridge: Carla 0.9.15 and Autoware Universe Humble
Carla 0.9.15 and Autoware Universe Humble. Contribute to TUMFTM/Carla-Autoware-Bridge development by creating an account on GitHub.
github.com
2-1 CARLA 시뮬레이터
docker pull carlasim/carla:0.9.15docker run \
--name carla \
--privileged \
--gpus all \
--net=host \
-e DISPLAY=$DISPLAY \
-v /tmp/.X11-unix:/tmp/.X11-unix:rw \
carlasim/carla:0.9.15 \
/bin/bash ./CarlaUE4.sh -vulkan -carla-rpc-port=1403
docker start carla
2-2 CARLA Autoware Bridge
GitHub - ttgamage/carla-ros-bridge: ROS Humble bridge for CARLA v0.9.15
ROS Humble bridge for CARLA v0.9.15. Contribute to ttgamage/carla-ros-bridge development by creating an account on GitHub.
github.com
docker pull tumgeka/carla-autoware-bridge:latest
docker run \
--name carla-autoware-bridge \
--rm \
-it \
--network host \
-e RMW_IMPLEMENTATION=rmw_cyclonedds_cpp \
tumgeka/carla-autoware-bridge:latest
docker start carla-autoware-bridge
docker exec -it carla-autoware-bridge /bin/bash
# Launch the bridge
ros2 launch carla_autoware_bridge carla_aw_bridge.launch.py port:=1403 town:=Town10HD
ros2 launch carla_autoware_bridge carla_aw_bridge.launch.py port:=1403 town:=Town02
# spawn traffic
python3 src/carla_autoware_bridge/utils/generate_traffic.py -p 1403
2-3 Autoware
Option 1) autoware-universe:humble-2024.01-cuda-amd64
`TUMFTM/Carla-Autoware-Bridge`에서 설명하는 autoware 도커 이미지는 제공되지 않고 있다.
git clone https://github.com/TUMFTM/Carla_t2.git
ros2 launch autoware_launch e2e_simulator.launch.xml vehicle_model:=carla_t2_vehicle sensor_model:=carla_t2_sensor_kit map_path:=<path to /wsp/map>
docker pull ghcr.io/autowarefoundation/autoware:humble-2024.01-cuda-amd64
rocker --network=host -e RMW_IMPLEMENTATION=rmw_cyclonedds_cpp -e LIBGL_ALWAYS_SOFTWARE=1 --x11 --nvidia --volume /path/to/code -- ghcr.io/autowarefoundation/autoware-universe:humble-2024.01-cuda-amd64
Issue)
문제 1. rocker 미지원
Docker installation quick start Failed! · Issue #8700 · autowarefoundation/autoware_universe
Checklist I've read the contribution guidelines. I've searched other issues and no duplicate issues were found. I'm convinced that this is not my fault but a bug. Description I tried following the ...
github.com
sudo apt install software-properties-common
sudo add-apt-repository universe
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
sudo apt-get install python3-rocker문제 2. autoware universe 도커 이미지 인증 문제
# Autoware 이미지 풀
docker pull ghcr.io/autowarefoundation/autoware-universe:humble-2024.01-cuda-amd64
Error response from daemon: Head "
https://ghcr.io/v2/autowarefoundation/autoware-universe/manifests/humble-2024.01-cuda-amd64
": unauthorized
- 해결 방법
- 옵션 1) 어떤 유저가 수정해서 fork함 → better_autoware_launch
- 옵션 2) 소스코드로 빌드
Option 2) Better Autoware Launch
GitHub - YuqiHuai/better_autoware_launch
Contribute to YuqiHuai/better_autoware_launch development by creating an account on GitHub.
github.com
git clone git@github.com:YuqiHuai/rocker.git --depth=1
cd rocker
pip install -e .
# for uv
# pip install -e . --systemgit clone https://github.com/YuqiHuai/better_autoware_launch.git
cd better_autoware_launch
bash docker/build/build_docker.sh
bash docker/build/build_docker.sh --multi_container
# bash docker/scripts/dev_start.sh --container_name autoware --use_multi_container
# bash docker/scripts/dev_into.sh --container_name autoware
`docker/scripts/dev_start_custom.sh` 작성
# !/bin/bash
CONTAINER_NAME="autoware_dev_${USER}"
USE_MULTI_CONTAINER=false
GREAT_GRAND_PARENT=$(dirname "$(dirname "$(dirname "$(realpath "$0")")")")
show_help() {
echo -e "\e[34mUsage:\e[0m $0 [options]"
echo -e "\e[34mOptions:\e[0m"
echo -e " \e[32m--container_name <name>\e[0m Set container name"
echo -e " \e[32m--use_multi_container\e[0m Enable multi-container mode"
echo -e " \e[32m--help\e[0m Show this help message"
exit 0
}
# Parse named arguments
while [[ $# -gt 0 ]]; do
case "$1" in
--container_name)
CONTAINER_NAME="$2"
shift 2
;;
--use_multi_container)
USE_MULTI_CONTAINER=true
shift
;;
--help)
show_help
;;
*)
echo -e "\e[31m[ERROR]: Unknown argument $1\e[0m"
show_help
;;
esac
done
# check if image is built
check_image() {
if [[ "$(docker images -q $IMAGE_NAME 2>/dev/null)" == "" ]]; then
echo -e "\e[31m[ERROR]: Image $IMAGE_NAME not found\e[0m"
exit 1
fi
}
if [[ "$USE_MULTI_CONTAINER" == true ]]; then
IMAGE_NAME="sora_autoware_multi_container:latest"
else
IMAGE_NAME="sora_autoware:latest"
fi
check_image
# check if container is running
if [[ "$(docker ps -q -f name=$CONTAINER_NAME)" != "" ]]; then
echo -e "\e[31m[ERROR]: Container $CONTAINER_NAME already running\e[0m"
exit 1
fi
rocker --nvidia --privileged --x11 --user --net host \
-e RMW_IMPLEMENTATION=rmw_cyclonedds_cpp \
-e LIBGL_ALWAYS_SOFTWARE=1 \
--volume $GREAT_GRAND_PARENT/data/autoware_map:$HOME/autoware_map \
--volume $GREAT_GRAND_PARENT:$HOME/better_autoware_launch \
--name $CONTAINER_NAME \
--hostname $CONTAINER_NAME \
--mode non-interactive \
--detach \
-- $IMAGE_NAME sleep infinity
echo -e "\e[32m[INFO]: Started container $CONTAINER_NAME\e[0m"bash docker/scripts/dev_start_custom.sh --container_name autoware --use_multi_container
bash docker/scripts/dev_into.sh --container_name autoware
Option 3) Autoware Universe 소스코드 빌드
GitHub - autowarefoundation/autoware_universe
Contribute to autowarefoundation/autoware_universe development by creating an account on GitHub.
github.com
mkdir -p ~/autoware_ws/src
cd ~/autoware_ws/src
git clone -b humble https://github.com/autowarefoundation/autoware_universe.git
cd ..
colcon build --symlink-install
3. CARLA ROS Bridge
GitHub - ttgamage/carla-ros-bridge: ROS Humble bridge for CARLA v0.9.15
ROS Humble bridge for CARLA v0.9.15. Contribute to ttgamage/carla-ros-bridge development by creating an account on GitHub.
github.com
source .venv/bin/activate
mkdir ros-bridge && cd ros-bridge
git clone --recurse-submodules https://github.com/ttgamage/carla-ros-bridge.git
mv carla-ros-bridge src
rosdep update
rosdep install --from-paths src --ignore-src -r
colcon build --symlink-install
source install/setup.zsh
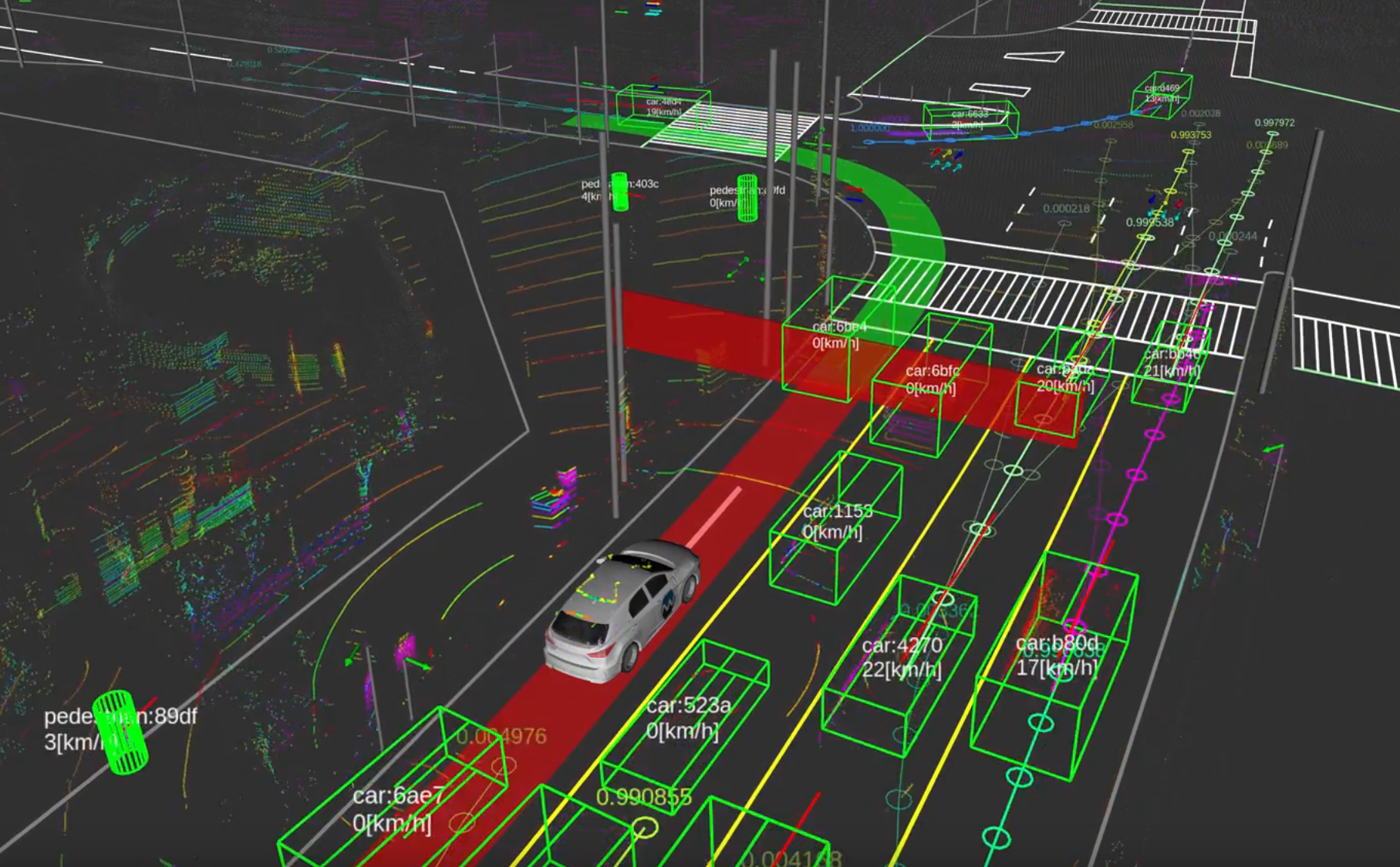
결과
아직 CARLA Autoware Bridge 연동만 확인되었다..
'Spatial AI > SLAM' 카테고리의 다른 글
| ROS2 RTAB-Map 시뮬레이션 (1) | 2025.04.09 |
|---|---|
| ROS2 Cartographer & Nav2 - Gazebo로 시뮬레이션 (0) | 2025.04.05 |
| CARLA Simulator 설치 (0) | 2025.03.27 |
| 자율주행 오픈소스 데이터셋 & 소프트웨어 & 시뮬레이터 (0) | 2025.03.21 |
| 스마트 시티와 스마트 모빌리티 (0) | 2025.03.21 |